 BoxKit
BoxKit
![]()
![]()
![]()
![]()
![]()
![]()
Overview
BoxKit is a library that provides building blocks to parallelize and scale data science, statistical analysis, and machine learning applications for block-structured simulation datasets. Spatial data from simulations can be accessed and managed using tools available in this library to interface with packages like SciKit, PyTorch, and OpticalFlow for post-processing and analysis.
The library provides a Python interface to efficiently access Adaptive Mesh Refinement (AMR) data typical of simulation outputs, and leverages multiprocessing libraries like JobLib and Dask to scale analysis on Non-Uniform Memory Access (NUMA) and distributed computing architectures.
Installation
Stable releases of BoxKit are hosted on Python Package Index website (https://pypi.org/project/BoxKit/) and can be installed by executing,
pip install BoxKit --user
Note that pip should point to python3+ installation package
pip3.
Upgrading and uninstallation is easily managed through this interface using,
pip install --upgrade BoxKit --user
pip uninstall BoxKit
Pre-release version can be installed directly from the git reposity by executing,
pip install git+ssh://git@github.com/Box-Tools/BoxKit.git --user
BoxKit provides various installation options that can be used to configure the library with desired features. Following is a list of options,
with-cbox - With C++ backend
with-pyarrow - With Apache Arrow data backend
with-zarr - With Zarr data backend
with-dask - With Dask data/parallel backend
enable-testing - Enabling testing mode for development
Correspondingly, the installation command can be modified to include necessary options as follows,
export CXX=$(CPP_COMPILER)
pip install BoxKit --user --install-option="--enable-testing" --install-option="--with-cbox"
There maybe situations where users may want to install BoxKit in
development mode $\textemdash$ to design new features, debug, or
customize classes/methods to their needs. This can be easily
accomplished using the setup script located in the project root
directory and executing,
./setup develop
Development mode enables testing of features/updates directly from the
source code and is an effective method for debugging. Note that the
setup script relies on click, which can be installed using,
pip install click
The setup command acts a wrapper over setup.py to provide a
developer friendly interface. The --help option provides
instructions on how to configure installation with different options,
./setup --help
./setup develop --help
Usage
After pip installation, BoxKit can be imported inside Python
environment by adding the following to iPython notebooks and scripts,
import boxkit
Once the library is imported in the environment, simulation datasets can be read by executing,
# Read dataset from a Flash-X simulation
dset = boxkit.read_dataset(path_to_hdf5_file, source="flash")
New datasets can be created using the create_dataset method
# Create a dataset using custom attributes
dset = boxkit.create_dataset(**attributes)
Following is an example on how to create a block-structured dataset in BoxKit and use its interface. Similar functionality exists for datasets that are read from a simulation source like Flash-X (https://flash-x.org)
# Create a two-dimensional dataset with 25 blocks of size 4x4
dset = boxkit.create_dataset(xmin=0,xmax=1,ymin=0,ymax=1,nxb=4,nyb=4,nblockx=5,nblocky=5)
print(dset)
Dataset:
- type : <class 'boxkit.library._dataset.Dataset'>
- file : None
- keys : []
- dtype : []
- bound(z-y-x) : [0.0, 1.0] x [0.0, 0.8] x [0.0, 1.6]
- shape(z-y-x) : 1 x 4 x 4
- guard(z-y-x) : 0 x 0 x 0
- nblocks : 25
- dtype : {}
Next add a solution variable using,
# Add a solution variable to the dataset
dset.addvar("soln")
This creates a numpy memmap for solution variable and stores it on disk.
The data can be accessed directly using dset["soln"]. When dataset
is read from HDF5 source using read_dataset, like Flash-X
simulations, then its representation on the disk is in the form of
h5py objects.
print(numpy.shape(dset["soln"])
(25, 1, 4, 4)
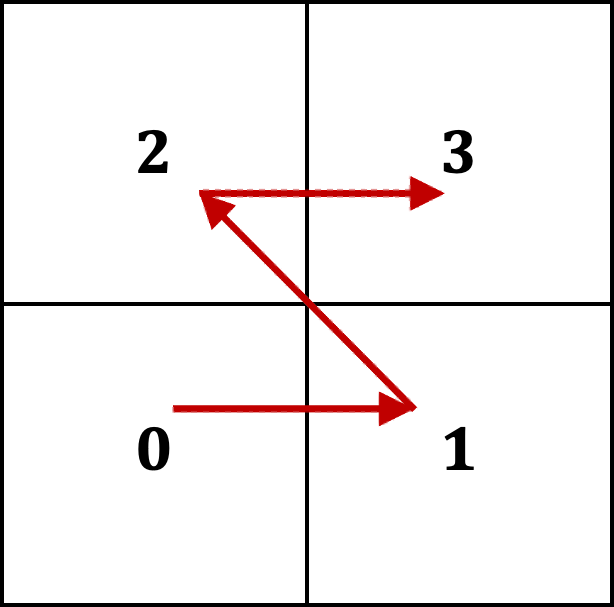
The example dataset here contains 25 blocks that are arranged using a space-filling morton order as below,
Solution data local to individual blocks can be accessed by looping over
a dataset’s blocklist
for block in dset.blocklist:
print(block["soln"])
BoxKit also offers wrappers to scale the process of deploying workflows on NUMA and distributed computing architectures by providing decorators that can parallelize Python operations over a single data structure to operate over a list,
from boxkit.library import Action
# Decorate function on a block with desired configuration for parallelization
@Action(num_procs, parallel_backend)
def operation_on_block(block, *args):
pass
# Call the function with list of blocks as the first argument
operation_on_block((block for block in list_of_blocks), *args)
The Action wrapper converts the function, operation_on_block,
into a parallel method which can be deployed on a multinode cluster with
the desired backend (JobLib/Dask). BoxKit does not interfere with
parallelization schema of target applications like SciKit, OpticalFlow,
and PyTorch which function independently using available resources.
Detailed information on full functionality is availabe in documentation (https://box-tools.github.io/BoxKit/).
Contribution
Developers are encouraged to fork the repository and contribute to the
source code in the form of pull requests to the development branch.
Please read documentation (https://box-tools.github.io/BoxKit/) for an
overview of software design and developer guide
Testing
Testing for BoxKit is performed across different hardware platforms where high-fidelity simulation data can reside. The sites $\textemdash$ acadia and sedona refer to a Mac and Ubuntu operating systems respectively where regular testing takes place.
For lightweight testing during pull requests and merger, new tests can
be added to tests/container. Each test should be accompanied with a
coresspoding addition to YAML files located under .github/workflows.
See tests/container/heater.py and .github/workflows/flashx.yaml
for an example.
Citation
@software{akash_dhruv_2023_8063195,
author = {Akash Dhruv},
title = {akashdhruv/BoxKit: June 2023},
month = jun,
year = 2023,
publisher = {Zenodo},
version = {2023.06},
doi = {10.5281/zenodo.8063195},
url = {https://doi.org/10.5281/zenodo.8063195}
}
Help & Support
Please file an issue on the repository page to report bugs, request features, and ask questions about usage